An Unmet Clinical Need
Head drop is a devastating condition in patients with a neurological disorder, such as amyotrophic lateral sclerosis (ALS). In ALS, the patients progressively lose muscle strengths and currently there is no cure. Due to weakness, a patient may have difficulty to hold the head upright or move it around. Head drop also blocks the airway of a patient, making it challenging to breathe, swallow, and speak.
Current care is limited. Static neck collars are often prescribed by physicians. Wheelchair users may also be able to recline the chair to rest the head or add a strap to fix the head upright. However, these solutions are not adopted by patients because they do not meet their needs, which is to restore the posture and movement of the head-neck. Fixing the head at a single configuration for too long is uncomfortable and also prevents a patient from interacting with others, such as making simple eye contacts in a conversation.
The Design Process
Movement Characterization
A motion capture system was used to characterize normal head-neck motion in human. The six degrees-of-freedom motion of the head relative to shoulders was of particular interest. Infrared markers were placed on both the face and the trunk of human subjects. The data shows that the head-neck motion possesses large rotations but small translations.
Mathematical Model
A novel 3-Revolute-Revolute-Spherical (3-RRS) parallel mechanism was used to capture the motion of the head-neck. The end-effector connects to the inertial base through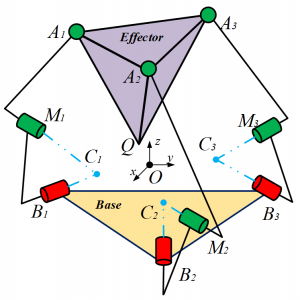 three mechanical chains in parallel. The joints in each kinematic chain are revolute, revolute, and spherical joints. In each chain, the two revolute axes are required to intersect at a point. Overall, there are three such fixed points from three chains. As a result, the end-effector has three degrees-of-freedom, with coupled rotations and translations.
three mechanical chains in parallel. The joints in each kinematic chain are revolute, revolute, and spherical joints. In each chain, the two revolute axes are required to intersect at a point. Overall, there are three such fixed points from three chains. As a result, the end-effector has three degrees-of-freedom, with coupled rotations and translations.
Since this robot uses a parallel architecture, its kinematics modelling is a bit more complicate compared to a serial-chain robot. However, this design choice allows all the actuators to be placed on the inertial base, making the robot lightweight during dynamic motion.
Eventually, the end-effector will be snuggly connected to the head and the inertial base will be fixed onto the shoulders. This mechanism is easy to assemble and its parameters can be optimized to meet the movement data of human subjects.
Physical Model
A hierarchical random search was used to optimize the design parameters, such as the link lengths, the placements of the intersecting points from the chains, etc. The optimization had two main objectives – to maximize the range of rotation and to minimize the translational error compared to human data.
The search space of parameters were selected so that the mechanical structure would be at the back of the user. As a result, the space in the front is open and the machine would not block the airway or the sight of view of the user. With this choice, the ranges of motion for head extension was also limited to protect the user from hyper-extending the neck. Overall, the robot allows about 70% ranges of rotations of the head-neck.
The development of this neck robot has gone through several iterations. In its current form, three Dynamixel servomotors are mounted at the base joints of the robot. With these motors, the robotic brace is highly back-drivable. They also provide position measurements through optical encoders, and current measurements through current sensors.
Applications
Though initially designed for head drop patients, the robot has been used in many other applications. Below are several examples of these applications: