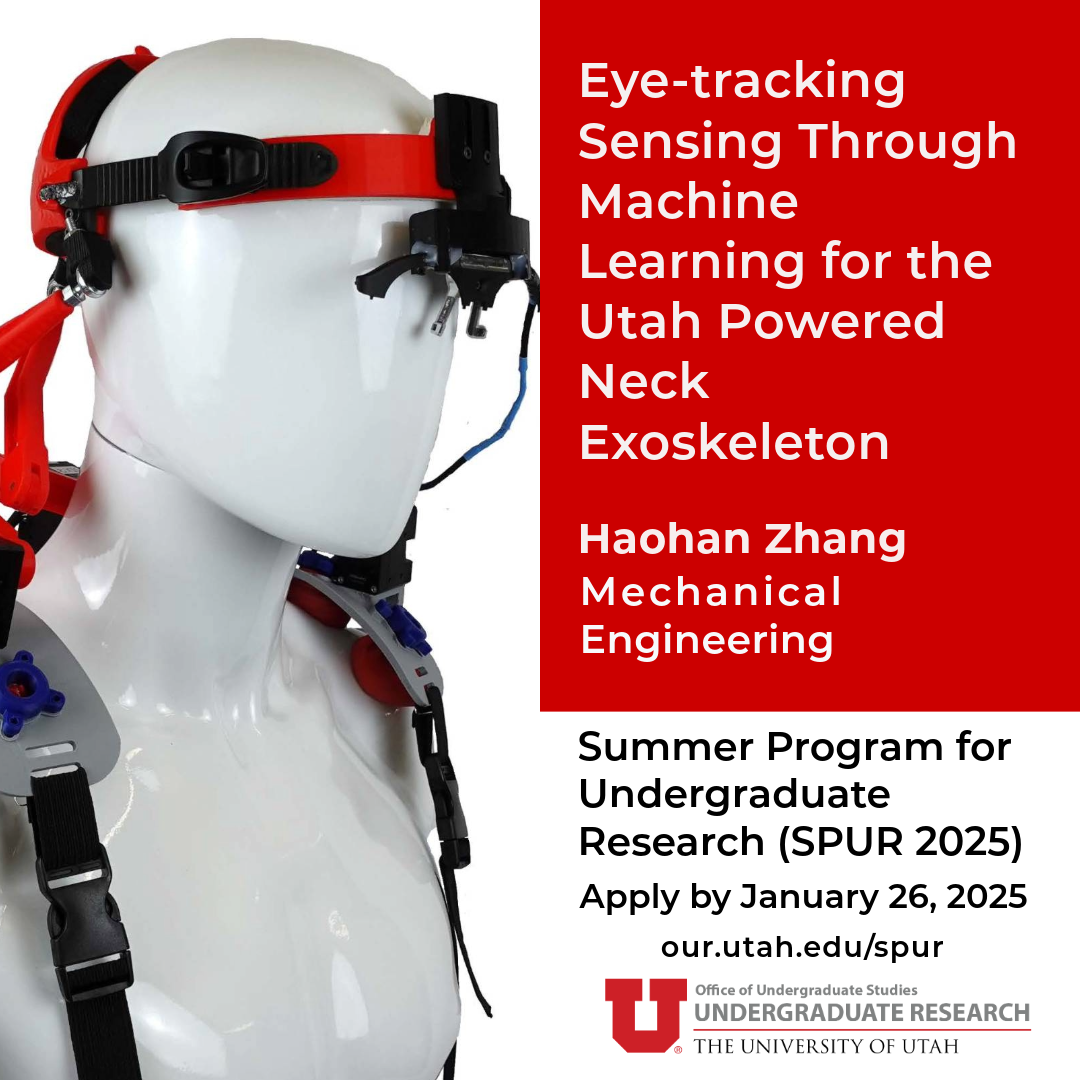
Prof. Zhang received an R21 Trailblazer award from the National Institute of Biomedical Imaging and Bioengineering (NIBIB) within the National Institute of Health (NIH). Trailblazer R21 is a prestigious award by NIH to fund early-career investigators to conduct high-risk high-reward scientific investigations. This 3-year project will be in collaboration with Prof. Daniel Brown from the Kahlert School of Computing (University of Utah). This award will help support multiple PhD students to develop predictive models for head movements conditioned on user’s gaze and user-in-the-loop gaze controller for a powered neck exoskeleton to help restore head-neck mobility in patients with dropped head syndrome.
Project Abstract:
Although static neck braces are prescribed to patients with dropped head syndrome, a condition that results from diverse causes (e.g., amyotrophic lateral sclerosis), many patients do not use these neck braces because they are static, uncomfortable, and ineffective. As a result, patients leave their head drop condition untreated, which worsens their ability to breathe, swallow, speak, and perform other daily tasks. The long-term goal is to treat dropped head syndrome by restoring head-neck motions through an at-home, personalized, and easy-to-use wearable robotic solution (e.g., neck exoskeleton). The overall objective in this application is to determine general models to predict head-neck movements in different gaze conditions (e.g., smooth pursuit, saccade) and a personalization strategy for a gaze-controlled neck exoskeleton in people with dropped head syndrome. The central hypothesis is that eye movements can reliably predict head movements in diverse situations and that preferences of people with dropped head syndrome can be learned via minimal and accessible human-robot interaction, leading to personalized control strategies for the neck exoskeleton. The rationale for this project is that a determination of effectiveness of predictive models and associated personalization strategies using eye gaze is likely to offer a powerful scientific platform for future development in neck exoskeletons and translational trials in people with dropped head syndrome. The central hypothesis will be tested by pursuing two specific aims: 1) Identify predictive model(s) of head-neck motions using gaze; and 2) Determine a personalization strategy for gaze control in people with dropped head syndrome. Under the first aim, head-eye behaviors will be observed in virtual environments and the data will be used to create models that predict head-neck motions using eye movements for diverse gaze behaviors (e.g., smooth pursuit, saccade). For the second aim, three proposed personalization algorithms will be developed and evaluated in a user study to determine the most effective strategy for personalizing gaze-control of a neck exoskeleton for patients with dropped head syndrome. The research proposed in this application is innovative, in the applicants’ opinion, because it focuses on achieving an easy-to-use control through user’s natural gaze behavior and a continued human-in-the-loop personalization strategy. The proposed research is significant because it is expected to provide strong scientific justification for continued development of the gaze-controlled neck exoskeleton and future clinical trials that are aimed to eventually translate the neck exoskeleton technology to use at patients’ homes. Ultimately, such knowledge has the potential of offering new opportunities for better treatment for dropped head syndrome.




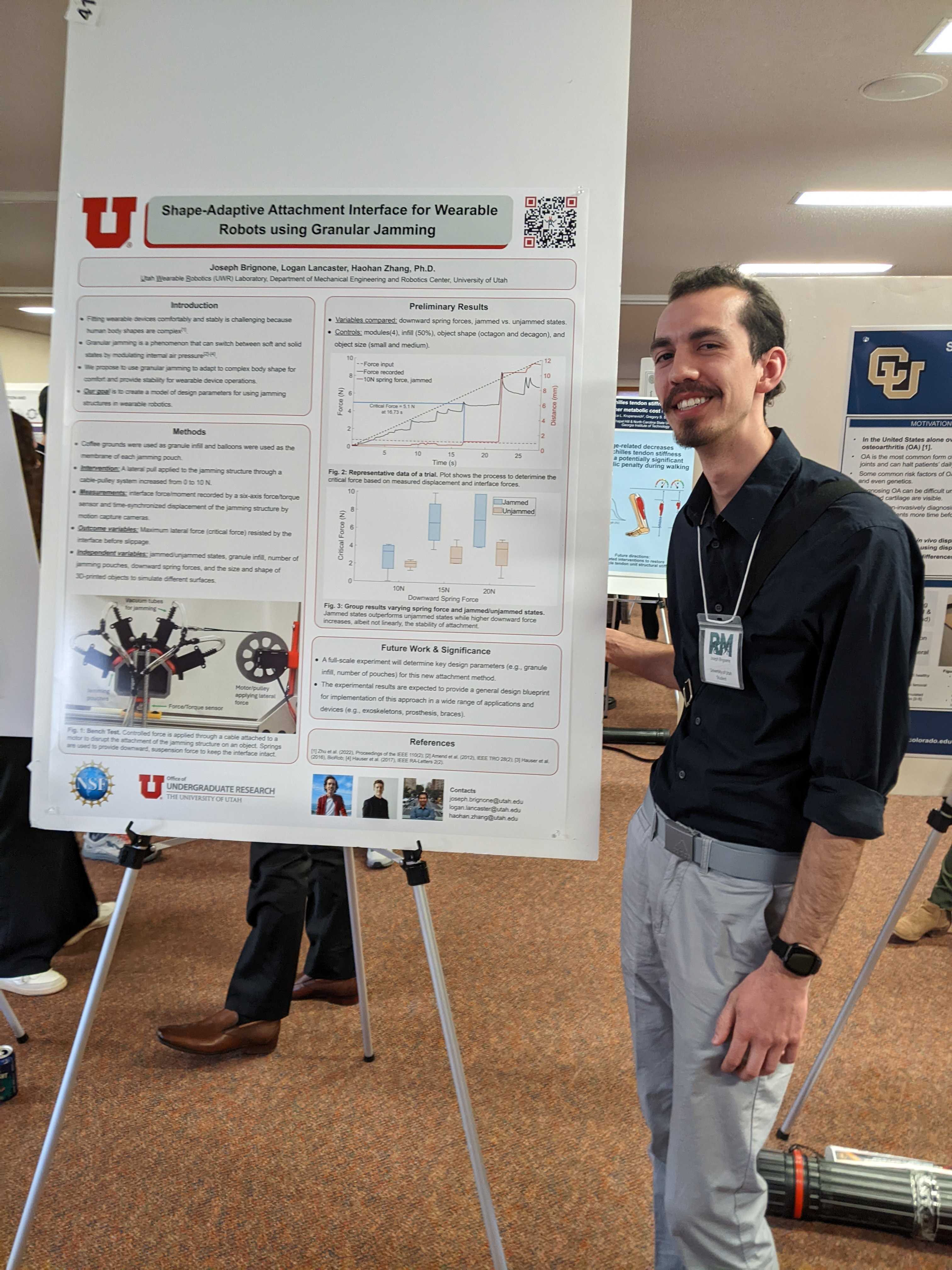

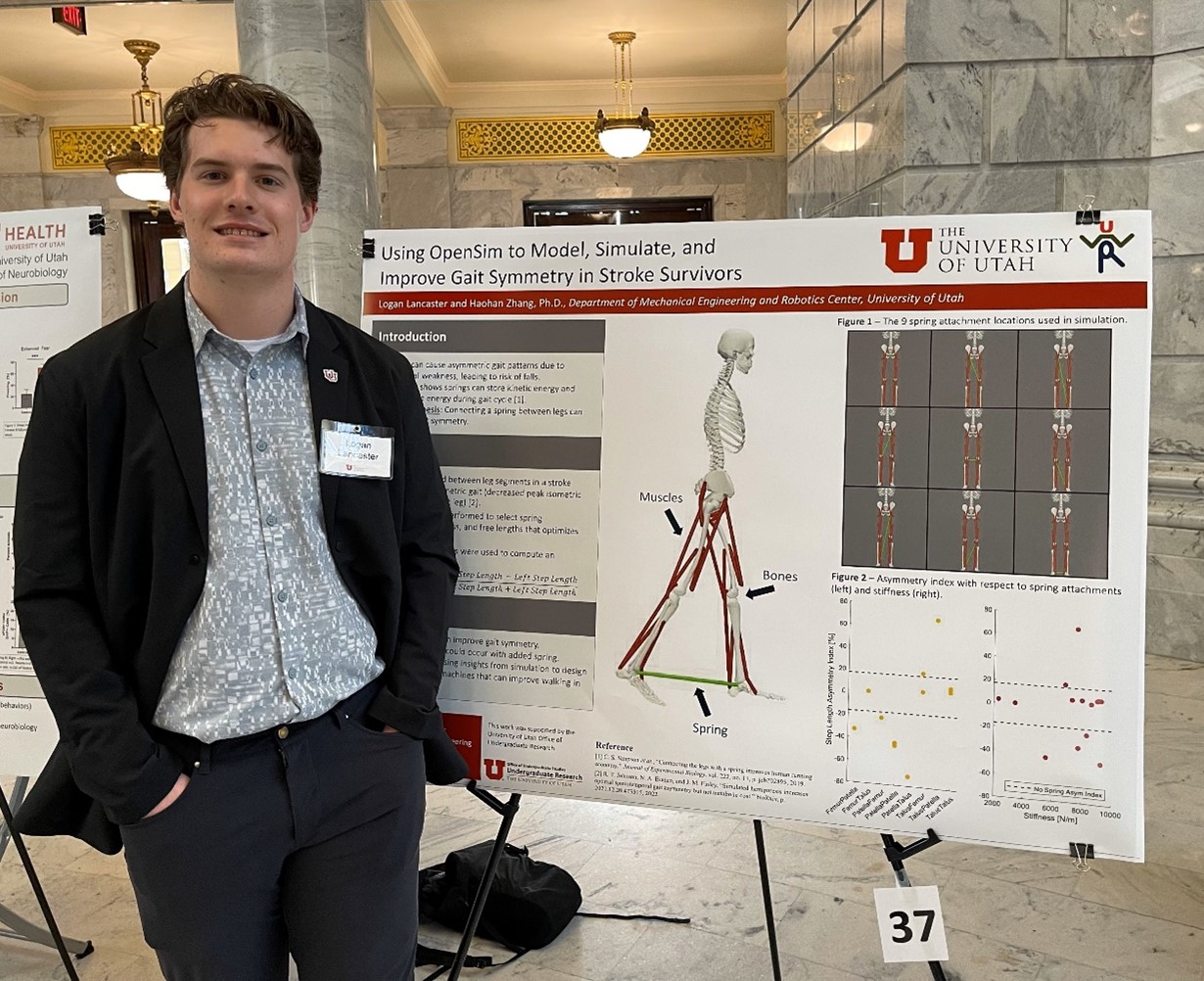

 Zach in front of his poster.
Zach in front of his poster. Zach presenting his poster.
Zach presenting his poster. Kin explain his project to a visitor.
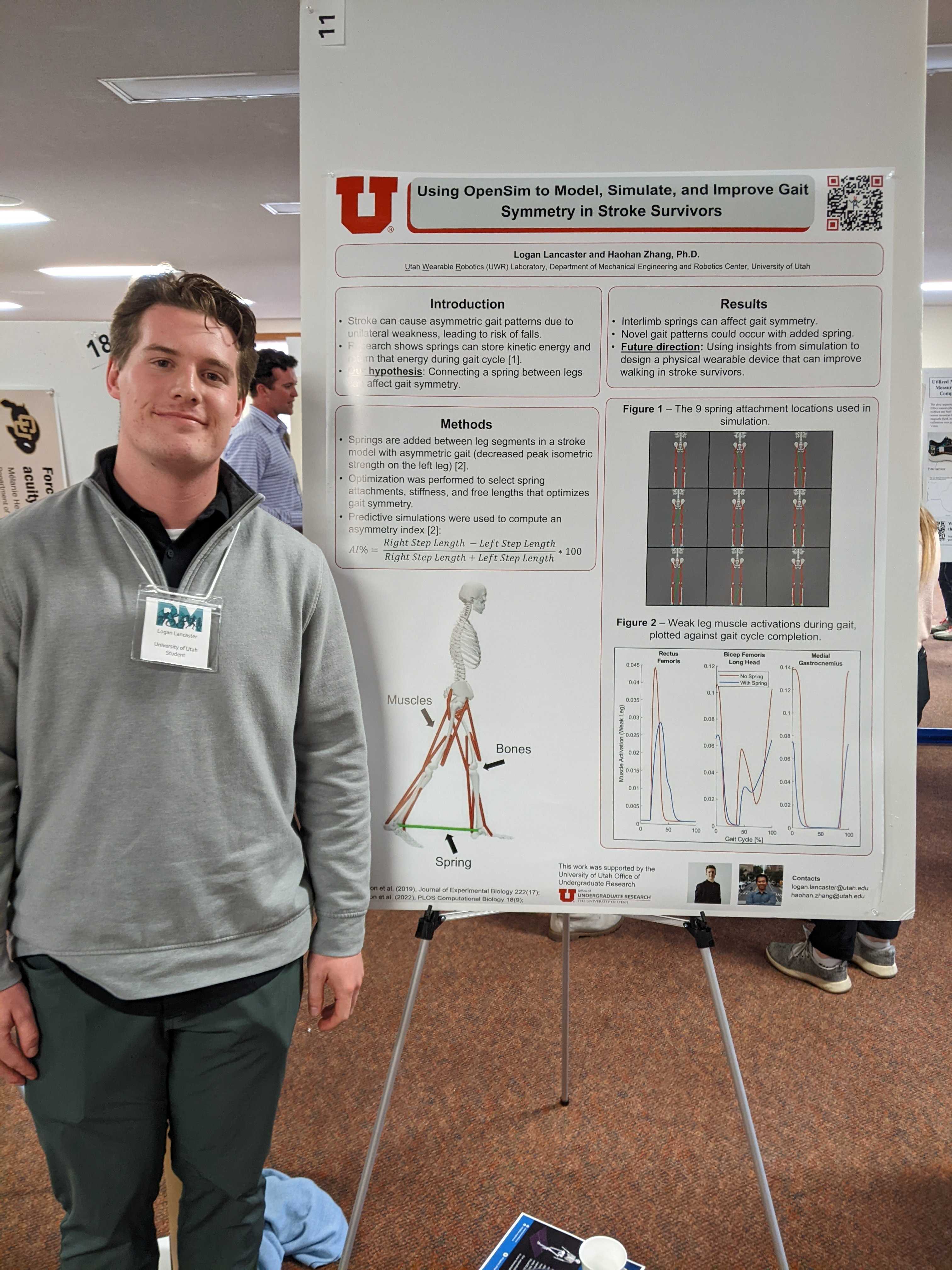
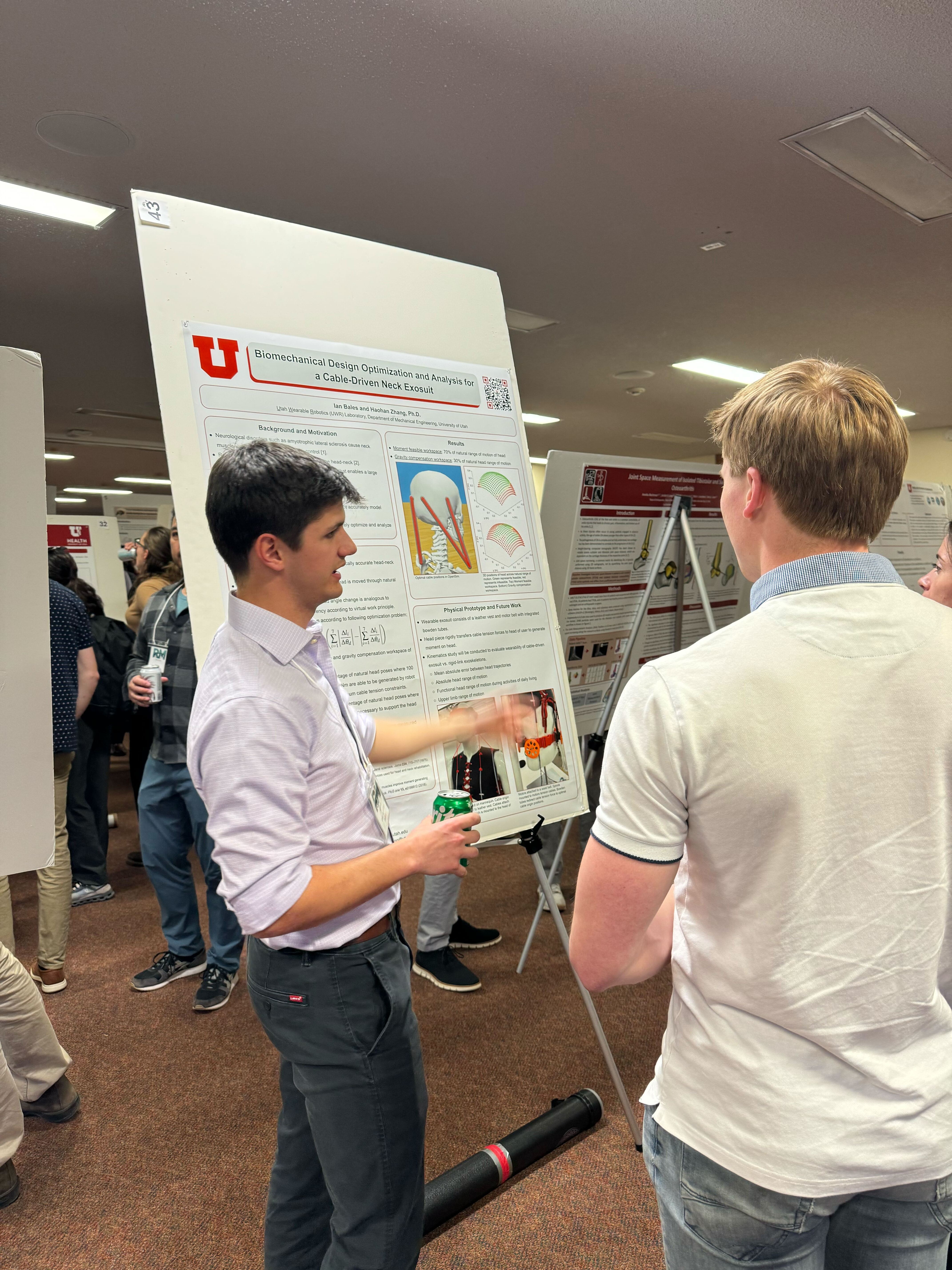
Kin explain his project to a visitor. Kin in front of his poster.
Kin in front of his poster.
