
Gyllian and Dr. Zhang were interviewed by the Office of Undergraduate Studies here at the University of Utah. They show the device prototype in action and explain the research process. Here is the video of the interview:
UWR Lab goes to the Walk ALS in Sugarhouse Park
On September 27, Joey, Claudia, and Dr. Zhang attended Walk ALS Utah, hosted by ALS United Rocky Mountain at Sugarhouse Park. Our lab members had the opportunity to speak with clinicians from the University of Utah ALS Clinic, meet some ALS patients, and catch up with other patients who have participated in lab user studies. Jared Nelson (pictured below), the ALS United representative at the University of Utah Hospital, and other staff delivered some wonderful remarks before the walk. It is a pleasure to work with this organization, which reminds us that “Together, We End ALS”.

Join us through the Summer Program for Undergraduate Research (SPUR)!
SPUR provides undergraduates with an intensive paid 10-week research experience under the mentorship of a University of Utah faculty member. The UWRL will participate in the SPUR program at the University of Utah this summer. Please see the flyer below.
Apply here: https://our.utah.edu/research-scholarship-opportunities/spur/
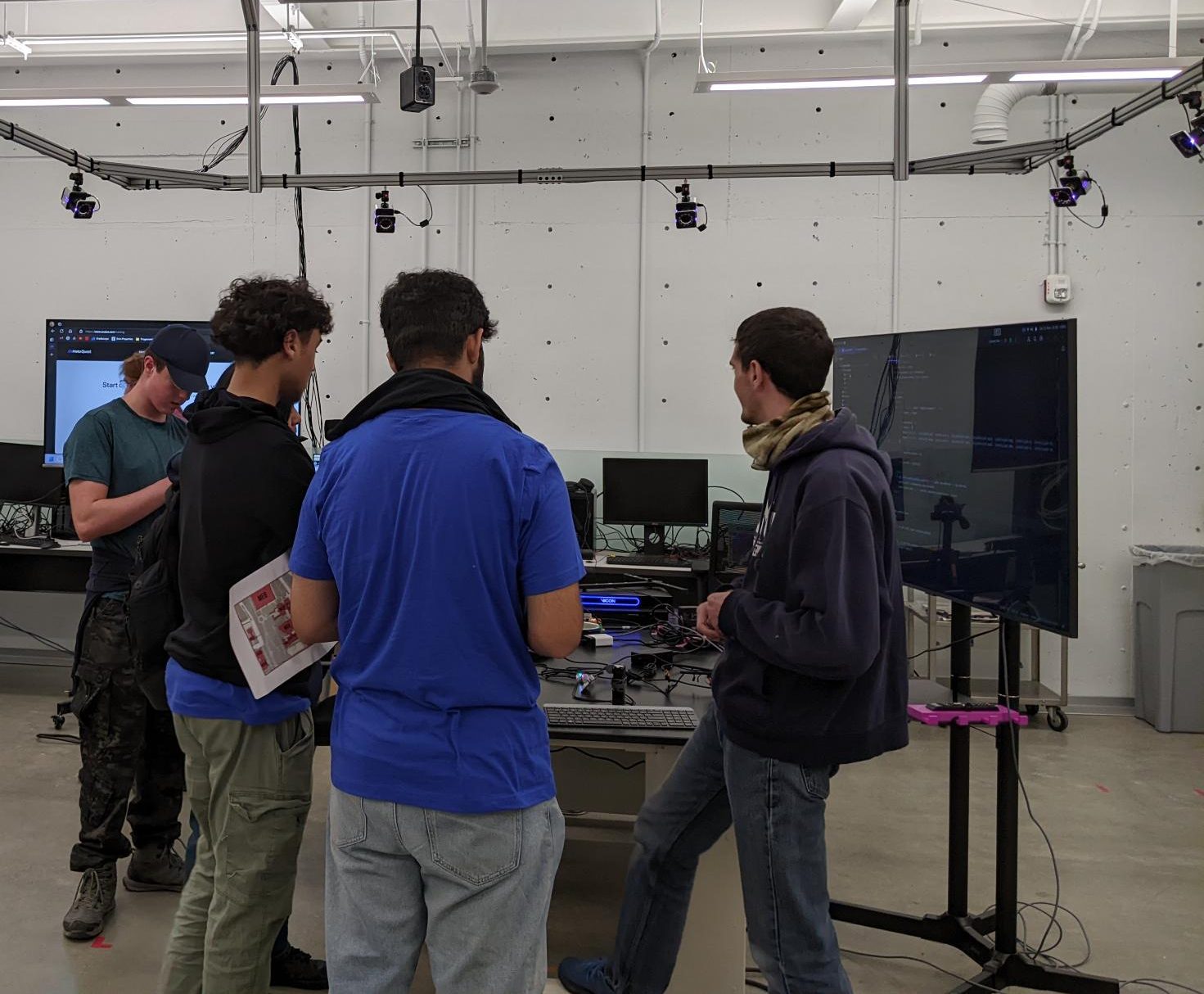
Robotic systems from UWR Lab demoed at the National Biomechanics Day
Members from the UWR Lab participated in the National Biomechanics Day which was an outreach event organized by the ASB student chapter at the University of Utah to help promote biomechanics research. Projects from the UWR Lab was featured in live demos to students from local high schools and undergraduate programs.

UWR Lab members present at the Rocky Mountain American Society of Biomechanics Annual Meeting
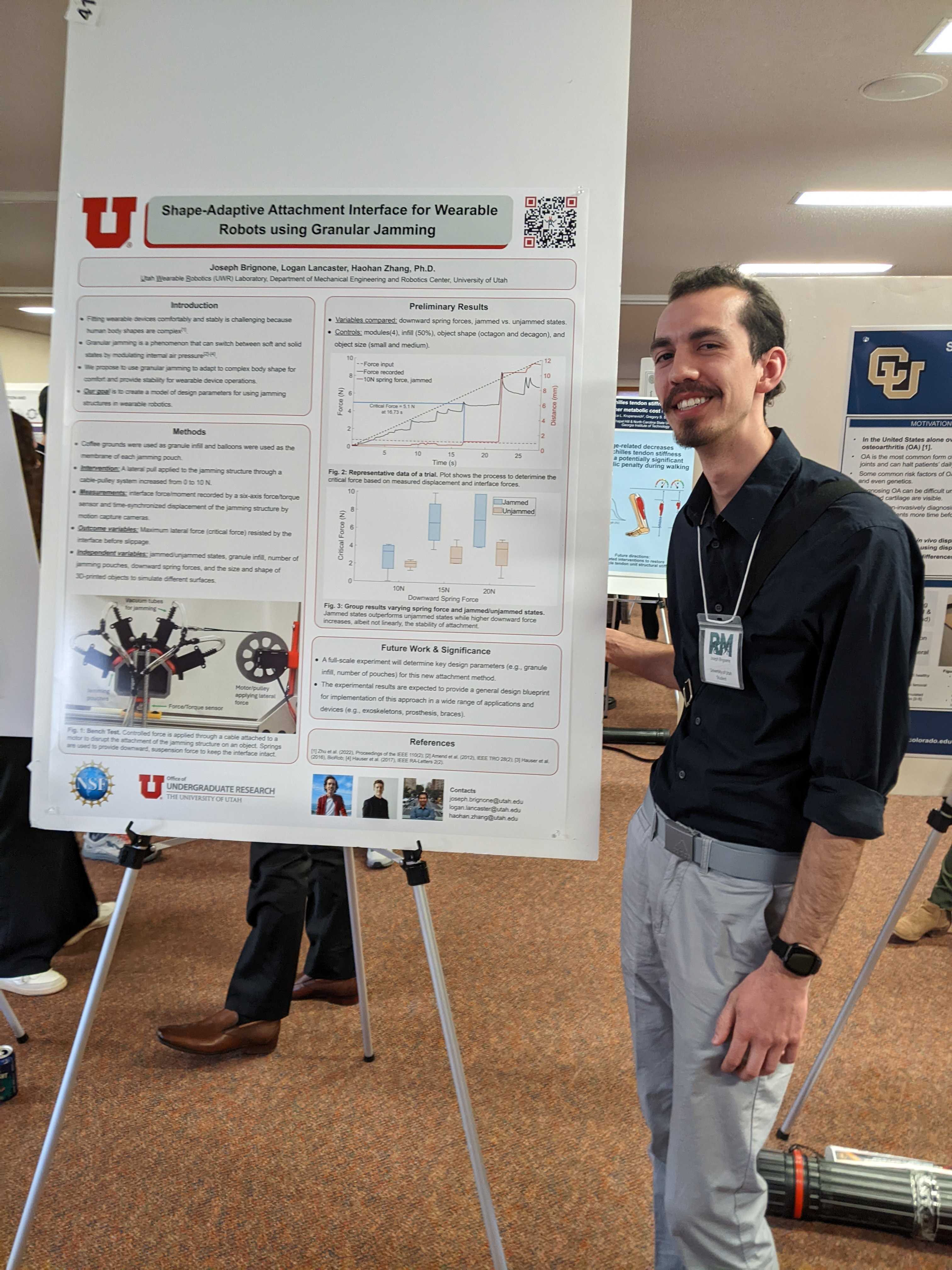
On 4/4 and 4/5, the UWR Lab participated in the annual RMASB meeting. Three podium talks were presented by Kimia Khoshnami, Adam Reinsch, and Colin Rubow. In addition, Ian Bales, Logan Lancaster, and Joey Brignone presented their work via posters.


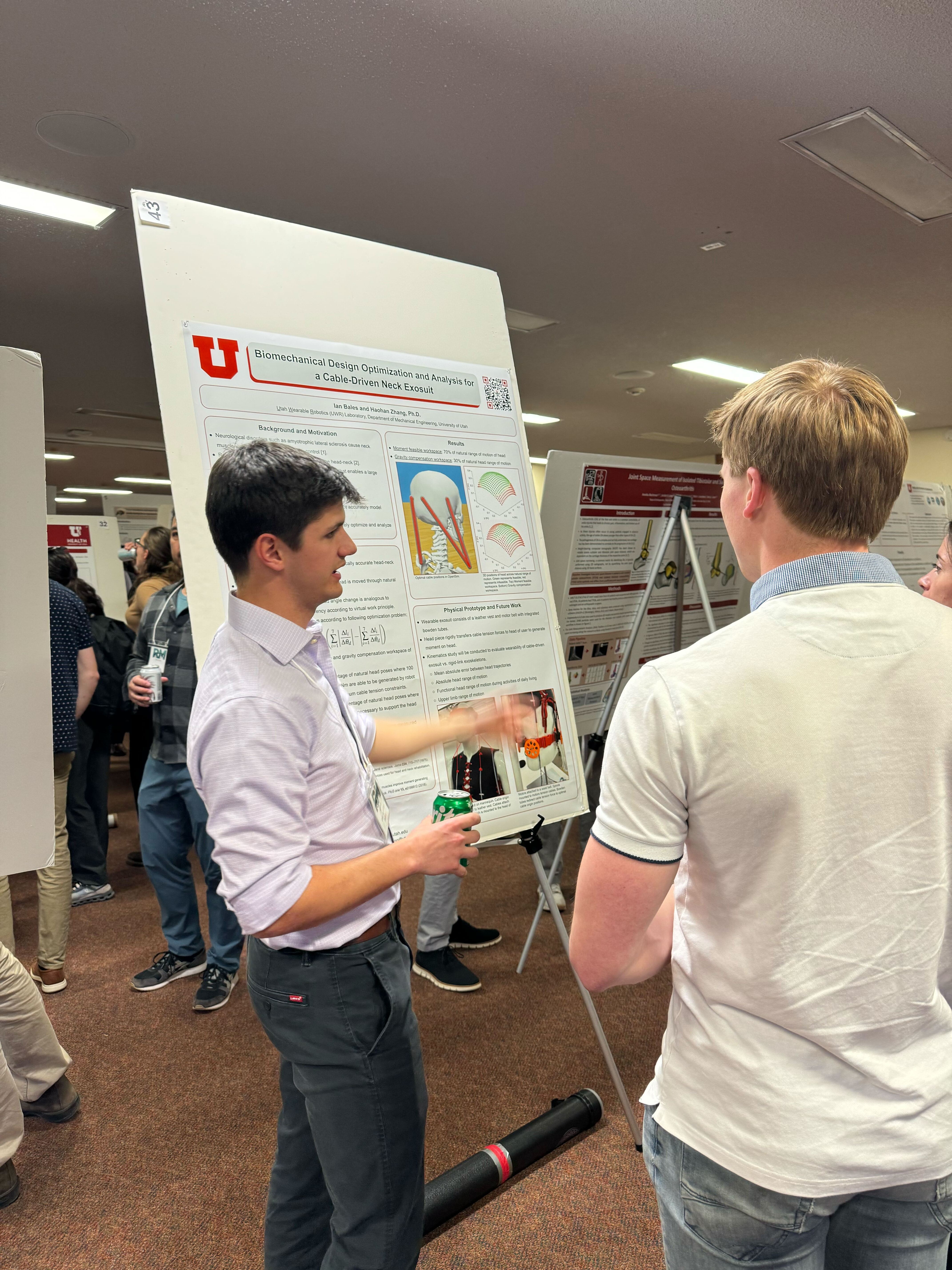
Big congratulations to Adam who won the best presentation award as a MS student!

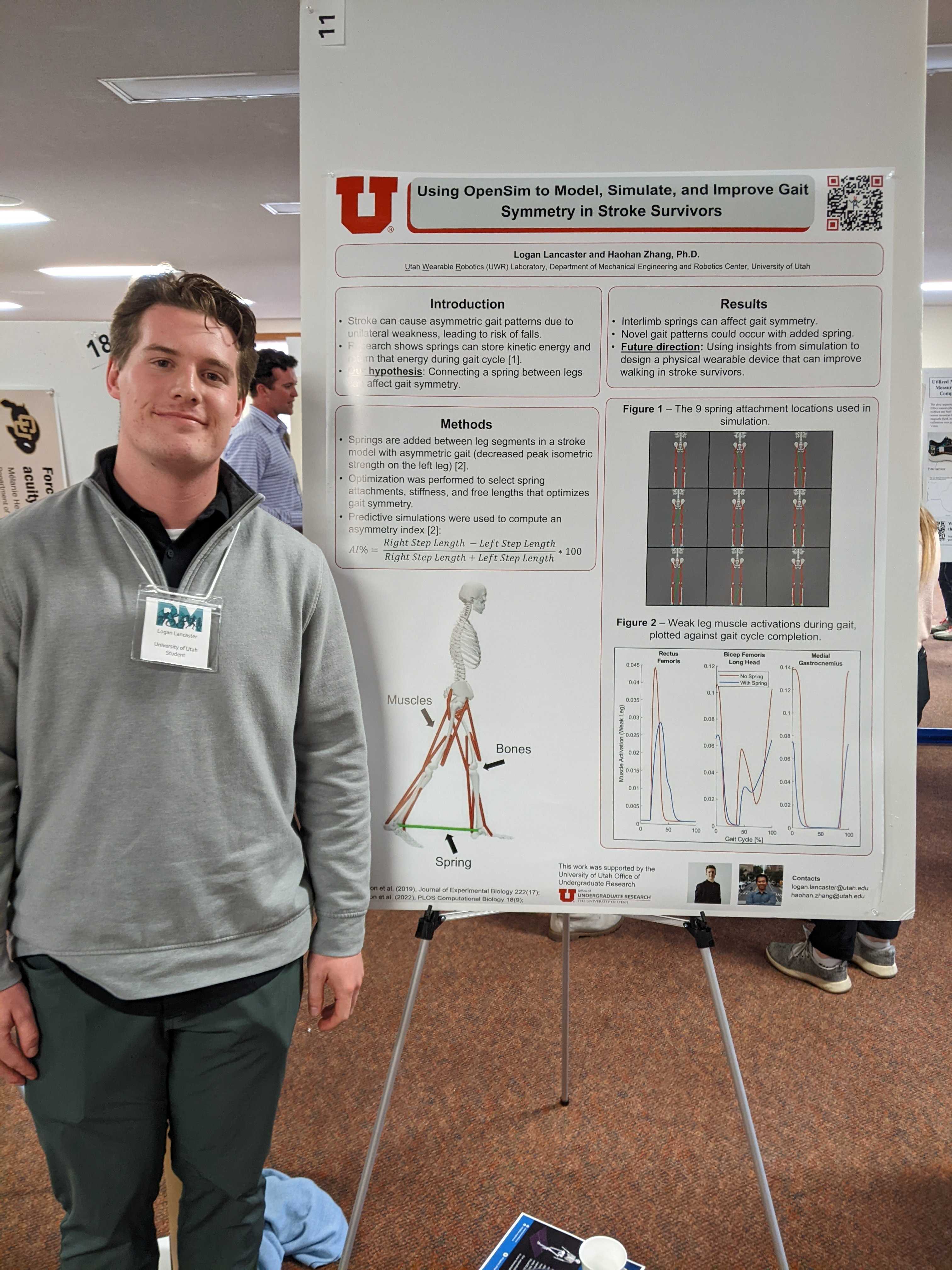
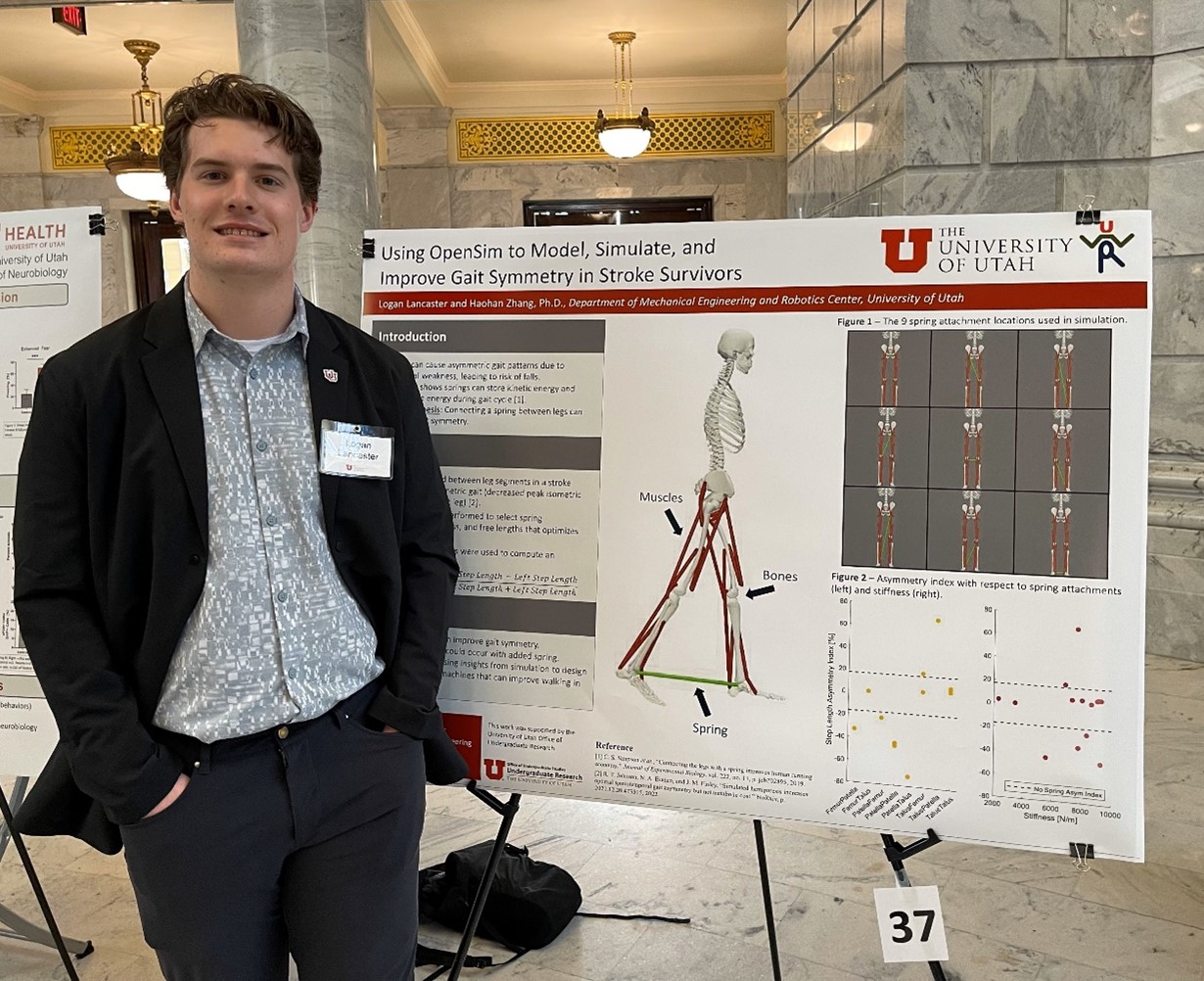
Logan Lancaster presented his research at the Capitol Hill!
On 1/18, Logan presented his research at the 2024 Research at the Capitol (ROCH) event at the Utah State Capitol. 25 undergraduate students from the University of Utah and 25 undergraduate students from Utah State University got to present at this event. Logan’s poster was on using OpenSim to model, simulate, and improve gait symmetry in stroke survivors. He got to share his research with students, people visiting the capitol, and even some Utah senators and house representatives.
See more media coverage and information through this link.
We are awarded by the NIBIB Trailblazer program
Prof. Zhang received an R21 Trailblazer award from the National Institute of Biomedical Imaging and Bioengineering (NIBIB) within the National Institute of Health (NIH). Trailblazer R21 is a prestigious award by NIH to fund early-career investigators to conduct high-risk high-reward scientific investigations. This 3-year project will be in collaboration with Prof. Daniel Brown from the Kahlert School of Computing (University of Utah). This award will help support multiple PhD students to develop predictive models for head movements conditioned on user’s gaze and user-in-the-loop gaze controller for a powered neck exoskeleton to help restore head-neck mobility in patients with dropped head syndrome.
Project Abstract:
Although static neck braces are prescribed to patients with dropped head syndrome, a condition that results from diverse causes (e.g., amyotrophic lateral sclerosis), many patients do not use these neck braces because they are static, uncomfortable, and ineffective. As a result, patients leave their head drop condition untreated, which worsens their ability to breathe, swallow, speak, and perform other daily tasks. The long-term goal is to treat dropped head syndrome by restoring head-neck motions through an at-home, personalized, and easy-to-use wearable robotic solution (e.g., neck exoskeleton). The overall objective in this application is to determine general models to predict head-neck movements in different gaze conditions (e.g., smooth pursuit, saccade) and a personalization strategy for a gaze-controlled neck exoskeleton in people with dropped head syndrome. The central hypothesis is that eye movements can reliably predict head movements in diverse situations and that preferences of people with dropped head syndrome can be learned via minimal and accessible human-robot interaction, leading to personalized control strategies for the neck exoskeleton. The rationale for this project is that a determination of effectiveness of predictive models and associated personalization strategies using eye gaze is likely to offer a powerful scientific platform for future development in neck exoskeletons and translational trials in people with dropped head syndrome. The central hypothesis will be tested by pursuing two specific aims: 1) Identify predictive model(s) of head-neck motions using gaze; and 2) Determine a personalization strategy for gaze control in people with dropped head syndrome. Under the first aim, head-eye behaviors will be observed in virtual environments and the data will be used to create models that predict head-neck motions using eye movements for diverse gaze behaviors (e.g., smooth pursuit, saccade). For the second aim, three proposed personalization algorithms will be developed and evaluated in a user study to determine the most effective strategy for personalizing gaze-control of a neck exoskeleton for patients with dropped head syndrome. The research proposed in this application is innovative, in the applicants’ opinion, because it focuses on achieving an easy-to-use control through user’s natural gaze behavior and a continued human-in-the-loop personalization strategy. The proposed research is significant because it is expected to provide strong scientific justification for continued development of the gaze-controlled neck exoskeleton and future clinical trials that are aimed to eventually translate the neck exoskeleton technology to use at patients’ homes. Ultimately, such knowledge has the potential of offering new opportunities for better treatment for dropped head syndrome.
UWR Lab participated in Engineering Day
On 11/10, the UWR Lab gave a tour to prospective undergraduate students from local high schools. Over 30 prospective students attended the tour where our members provided multiple highly interactive demos to these students. Students had a chance to ask questions about research and experience cutting-edge wearable robotic systems.
Kin and Zach presented at the Undergraduate Research Synposium
Kin and Zach presented their summer projects at the Undergraduate research symposium. Kin’s project was funded by UROP where he developed a new mechatronic system to control our neck exoskeleton through eye movements (measured by a gaze tracker). This system will help us study human eye-head coordination behaviors and help people with head-neck mobility limitations to regain normal head-neck motions. Zach’s project was funded by the SPUR program. He developed a reconfigurable room for a biomechanical study where researchers were interested in optimizing room designs to reduce the risks of falls among hospital residents. They both have done excellent jobs to achieve their research goals. Congratulations to both!
 Zach in front of his poster.
Zach in front of his poster.
 Zach presenting his poster.
Zach presenting his poster.
 Kin explain his project to a visitor.
Kin explain his project to a visitor.
 Kin in front of his poster.
Kin in front of his poster.
David Demaree graduated from the UWR Lab
On June 23rd, 2023, David successfully defended his Masters’ Thesis titled “A structurally enhanced neck exoskeleton to assist head movement in ALS patients”. He is the first graduate student graduated from the Utah Wearable Robotics Laboratory. Congratulations to David. We are very proud of his achievement and wish him the best for his future endeavors.
