RATS stands for Robotic Animal Training System, which is a modular, reconfigurable, and autonomous solution for animal neurorehabilitation research. Currently, the system is tailored to lab rats.
Rehabilitation using robots has shown promises in recent years. However, evaluating these robots with human subjects is expensive and time consuming. While translational research using animal models provides an alternative at a faster speed and a lower cost, the study process itself is often manual and labor intensive.
Our goal is to develop a wearable robot for animal research that could automate the research process. Such a robot system could also be used to evaluate rehabilitation principles with injured animals. The insights gained from animal research may be translated to human research and thereby shortening its testing cycle and lowering the cost.
Current System
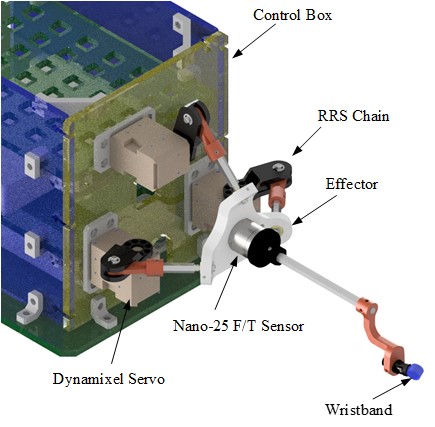

In our paper published on Journal of Mechanism and Robotics (JMR), we have detailed the kinematics design, physical implementation, and a preliminary testing of the robot with three healthy rats. As shown in the images above, the robot uses a special parallel structure and controls the force and position at the robot tip, which is where the wristband is attached to the animal’s forelimb. A force/torque sensor is installed at the end-effector to measure the force/moments applied to the animal.
To use this robot for rehab training, we have developed multiple force controllers. As an example, a force, which is proportional to the deviation from a desired forelimb path (e.g., a straight-line) was previously tested: