
Design of the Robotic Neck Exoskeletons
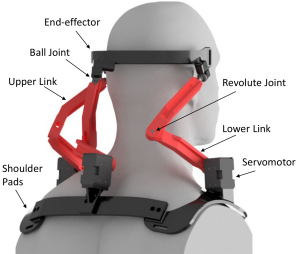 We previously developed a wearable neck exoskeletal robot for head drop. This robotic device uses a novel parallel architecture to accommodate natural head neck rotations. It was optimized to achieve large range of motion, driven by motion data recorded from a single healthy subject. It has been successfully used as a research platform, but it has several flaws that could be improved upon.
We previously developed a wearable neck exoskeletal robot for head drop. This robotic device uses a novel parallel architecture to accommodate natural head neck rotations. It was optimized to achieve large range of motion, driven by motion data recorded from a single healthy subject. It has been successfully used as a research platform, but it has several flaws that could be improved upon.
We currently seek to optimize the robotic neck brace with a larger human head-neck motion dataset which was made available from our preliminary evaluation of the previous robotic neck brace. In addition to range of motion, we will also optimize the brace to have favorable force transmission performance within its workspace.
We will also improve its physical implementation by using stronger material and more precise joint units. The human attachments will also be upgraded to improve comfort and fitting.
Cable-Actuated Robotic Systems
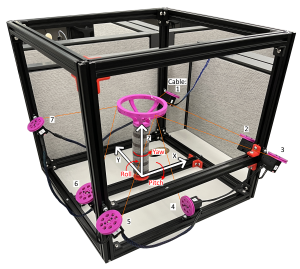
Building off the success of the rigid-link wearable neck exoskeleton, we seek to study the performance of a new cable-actuated neck exoskeleton design. Cable-actuated exoskeletons can be smaller, lighter, and more adaptable than their rigid-link counterparts.
Computational biomechnical modeling can be used to inform optimal designs of these devices to maximize performance and comfort in various applications.
Applications of these devices include rehabiliation, head support, and motion assistance. A desktop proof-of-concept model has been developed, with a chair-mounted and then fully wearable portable device in development.
See video here: https://youtu.be/LRG6Bd-BL8Q
Cable-Actuated Robot Papers 1, 2, 3
Systematically Characterizing the Eye-Head Coordination
From a biological point of view, the eyes of a predator has a closer distance between them so that they can be used to precisely locate objects (preys, for example). The disadvantage of this biological design is that the field of view is small. The neck, as a consequence, has a high mobility to help enlarge the field of view. This supplementary role of the head-neck movement is also reflected in our social life. One may make eye contacts with others through coordinated head-eye movements during a respectful conversation, for example.
The coordinated nature of the eye-head movements has attracted plenty of research, but previous datasets are limited where, for example, the head is fixed or the target movements are one-dimensional. The spatial and temporal characteristics of the head-eye movements remain unclear, especially during daily tasks. We currently seek to create a data collection procedure with the use of virtual reality. Engaging virtual environment will be created to systematically study different eye behaviors, as well as the associated head-neck movements. We aim to create a comprehensive dataset. Such a dataset could be meaningful for both scientific and technological research.